
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 [ 115 ] 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207
Глава XII
ЭЛЕКТРОТЕНЗОМЕТРИЧЕСКИЕ ВЕСЫ И ДОЗАТОРЫ
В последнее время все больше в устройствах для измерения массы тел используются электрические методы измерения механических величин. /Весы, в которых измерение механической величины- силы тяжести взвешиваемой массы - производится с помощью электрических методов, носят название электромеханических. ; (
Высокая точность, возможность дистанционной передачи результатов взвешивания, быстрота обработки данных взвешивания/. (возможность печатания результатов на картах или ленте) обусловливают расширение области применения электромеханических, устройств в весоизмерительной технике.
[ Электромеханические весы включают в себя первичный прибор (датчик), воспроизводящий нагрузку, и вторичный прибор, который измеряет и усиливает сигнал, полученный от датчика, и передает его на указательное устройство. При необходимости указательное устройство снабжено регистрирующей аппаратурой.;
В., электромеханических весах могут быть применены датчики нескольких типов: проволочный (или фольговый) тензорезистор-ный; индуктивный; емкостный; пьезоэлектрический и др. j Из них наибольшее распространение как в СССР, так и за рубежом получили проволочные датчики сопротивления, называемые тензомет-рическими или тензорезисторными.
В связи с этим в настоящей главе рассматриваются только весы с тензорезисторными датчиками, а из широкого круга весов, в которых могут быть применены указательные датчики, - более распространенные: платформенные и крановые весы, а также весовые дозаторы.
§ 88. Тензорезисторные датчики
Тензорезисторные датчики конструктивно состоят из двух основных частей: упругого элемента (тела), воспринимающего нагрузку, и тензорезистора (тензодатчика), изменяющего свое омическое сопротивление пропорционально деформации упругого элемента, которая, в свою очередь, пропорциональна приложенной нагрузке.
Упругие элементы тензорезисторных датчиков изготавливают из углеродистых сталей, легированных кремнием, марганцем, никелем, хромом, ванадием. Для стабилизации характеристик упругие элементы подвергают термообработке. Упругим элементам придают различную форму: прямого стержня, кольца, пластинки, тел вращения, работающих на сжатие или растяжение, консоли, подвергаемой изгибу [13].
Действие датчика основано на изменении омического сопротивления наклеенных на упругое тело тензорезисторов. Деформируясь под действием приложенной нагрузки Р, упругое тело деформирует тензорезисторы.
В весостроении чаще всего применяют датчики стержневого типа (рис. 221, а). Упругий стержень (или несколько стержней) / с наклеенными на него тензорезисторами 2 заключен в корпус 3, защищающий датчик от механических и температурных воздейст-



а б
Рис. 221. Тензорезисторные датчики
вий. На корпусе укреплена клеммная коробка 4, служащая для соединения датчика с вторичным прибором с помощью кабеля 5. Реже применяют датчики в форме кольца, работающего на растяжение или сжатие (рис. 221,6). В этом случае датчик состоит из упругого элемента (кольца) 1, который заключен в корпус 3. Тензорезисторы 2, пакленные на кольцо 1, подключают к клеммной коробке 4.
Известно, что напряжение о пропорционально деформации е,
с == е £,
где Е - модуль упругости материала.
е =
Для упругих элементов, работающих на растяжение или ежа--
Р
ие, относительную деформацию определяют из условия 8=-
ак как в этом случае о=-, где г - сечение упругого элемента.
Для упругих элементов, работающих на изгиб, 8=
[ак Б этом случае
де Л! = jPx-изгибающий момент, равный произведению измеряемого усилия Р на плечо х (см. рис. 224); W - момент сопротивления упругого элемента в рабочем, участке.
Оптимальные значения механических напряжений о, при кото-fbix должны работать упругие элементы весоизмерительных при-)оров, лежат в пределах 10-35 кГ/мм (100-350 МПа).
Простейшая мостовая схема датчиков состоит из четырех изме-)ительных элементов - тензорезисторов (рис. 222, на схеме jRi
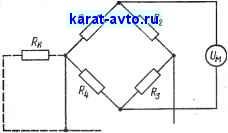
OUfiO-
нс. 222. Мостовая схема включения датчика
Рис. 223. Тензорезистор
?2, Рз, Ri - сопротивления плеч моста, Ом; f/n и - соответст-lenHo напряжения питания и измерительной диагонали моста. В). J общем случае схема датчиков дополнена сопротивлением Rk Показано на рис. 222 пунктиром) для выравнивания чувствитель-Юсти и компенсации температурных влияний.
Питание датчиков осуществляется переменным или постоянным оком напряжением 3-24 В. Сопротивление R тензорезисторов ожет быть в пределах 10-600 Ом.
, Основными частями тензорезистора (рис. 223) являются проволочная (фольговая) решетка 1 и подложка 2 (бумага, пленочная: снова). Для решетки тензорезистора, показанного на рисунке, спользуется металлическая нить диаметром 20-25 мк.м из кон--тантана, манганина и других сплавов.